Kernel signatures#
Heat and wave-kernel signatures provide an upgrade to simply looking at laplacian shape spectra as we did it in this notebook. They are based on the heat and wave kernels, which are the fundamental solutions to the heat and wave equations. In essence, they are based on the following principles:
Heat kernel signature: Uses the Laplacian eigenvalues and vectors to solve the heat diffusion equation. The heat kernel signature is the solution to the heat equation at a fixed time \(t\).
Wave kernel signature: Uses the Laplacian eigenvalues and vectors to solve the wave equation. The wave kernel signature is the solution to the Schrödinger equation at a fixed energy level \(E\).
import vedo
import napari_shape_odyssey as nso
import napari
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
from sklearn import manifold, cluster, preprocessing
viewer = napari.Viewer(ndisplay=3)
WARNING: QWindowsWindow::setGeometry: Unable to set geometry 4350x2120+1280+560 (frame: 4376x2191+1267+502) on QWidgetWindow/"_QtMainWindowClassWindow" on "\\.\DISPLAY1". Resulting geometry: 4350x2119+1280+560 (frame: 4376x2190+1267+502) margins: 13, 58, 13, 13 minimum size: 385x499 MINMAXINFO maxSize=0,0 maxpos=0,0 mintrack=796,1069 maxtrack=0,0)
Heat kernel#
Basic shapes#
Let’s first again see what these do for the basic shapes.
ellipsoid1 = vedo.Ellipsoid(pos=(0,0,0), axis1=(1,0,0), axis2=(0,1,0), axis3=(0,0,1), c='r', alpha=0.5).triangulate().clean()
ellipsoid2 = vedo.Ellipsoid(pos=(0,0,0), axis1=(1,0,0), axis2=(0,1,0), axis3=(0,0,2), c='r', alpha=0.5).triangulate().clean()
ellipsoid3 = vedo.Ellipsoid(pos=(0,0,0), axis1=(1,0,0), axis2=(0,2,0), axis3=(0,0,2), c='r', alpha=0.5).triangulate().clean()
cube = vedo.Cube(pos=(0,0,0), side=1, c='b', alpha=0.5).triangulate().clean().subdivide(method=1, n=3)
ellipsoid1.name = 'ellipsoid1'
ellipsoid2.name = 'ellipsoid2'
ellipsoid3.name = 'ellipsoid3'
shapes = [ellipsoid1, ellipsoid2, ellipsoid3, cube]
times = np.linspace(0, 15, 40)
t_visualize = np.arange(0, len(times), 7)
times
array([ 0. , 0.38461538, 0.76923077, 1.15384615, 1.53846154,
1.92307692, 2.30769231, 2.69230769, 3.07692308, 3.46153846,
3.84615385, 4.23076923, 4.61538462, 5. , 5.38461538,
5.76923077, 6.15384615, 6.53846154, 6.92307692, 7.30769231,
7.69230769, 8.07692308, 8.46153846, 8.84615385, 9.23076923,
9.61538462, 10. , 10.38461538, 10.76923077, 11.15384615,
11.53846154, 11.92307692, 12.30769231, 12.69230769, 13.07692308,
13.46153846, 13.84615385, 14.23076923, 14.61538462, 15. ])
for shape in shapes:
fig, axes = plt.subplots(ncols=len(t_visualize), figsize=(13, 7))
signature = nso.signatures.heat_kernel_signature((shape.points(), shape.faces()), times)
for i in range(len(t_visualize)):
mesh_tuple = (shape.points(), np.asarray(shape.faces()), signature[:, t_visualize[i]])
layer = viewer.add_surface(mesh_tuple, colormap='inferno', name=f'{shape.name} HKS t={t_visualize[i]}')
viewer.camera.angles = (-18, -30, 130)
viewer.camera.zoom = 710
screenshot = viewer.screenshot()
layer.visible = False
axes[i].imshow(screenshot)
axes[i].axis('off')
axes[i].set_title(f'Time {t_visualize[i]}')




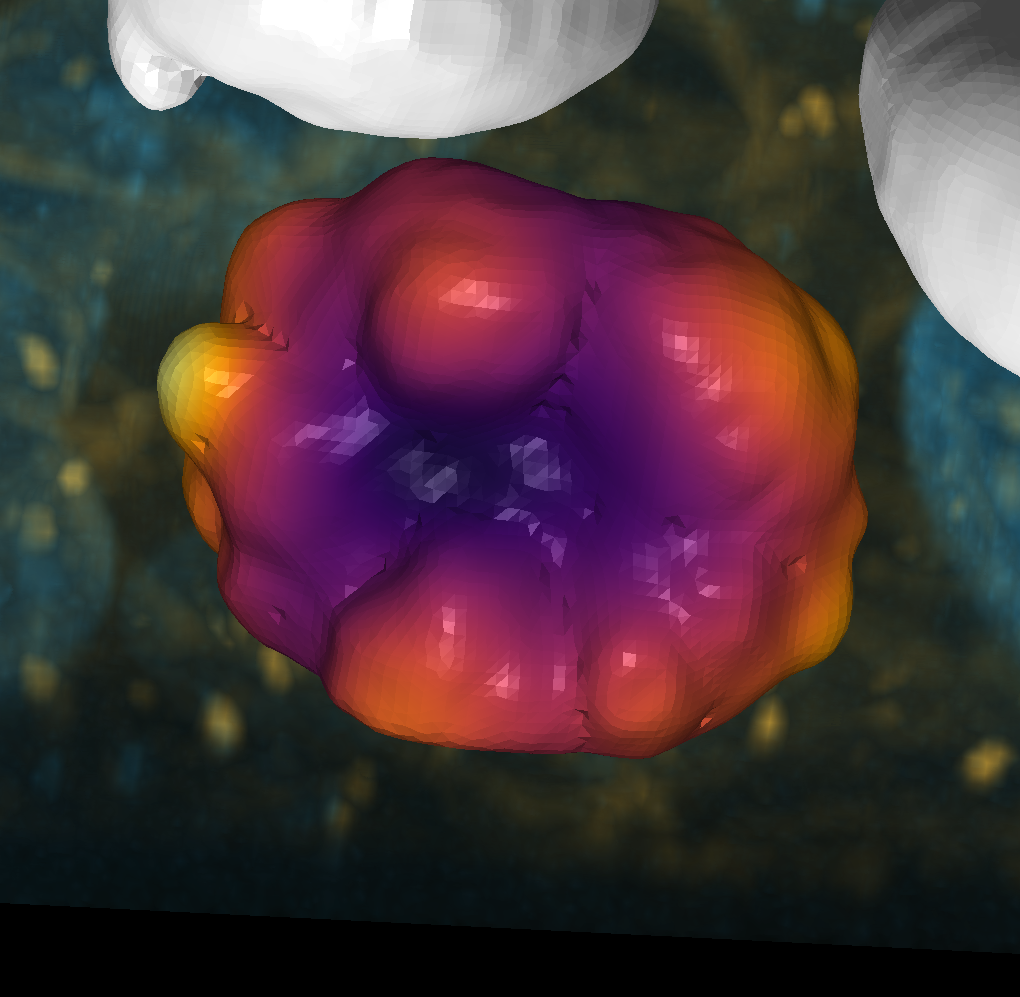
More complex shapes#
shape1 = vedo.load(vedo.dataurl+"cessna.vtk").triangulate().clean()
shape2 = vedo.load(vedo.dataurl+"cow.vtk").triangulate().clean().scale(2)
signature = nso.signatures.heat_kernel_signature((shape1.points(), np.asarray(shape1.faces())), times=times)
fig, axes = plt.subplots(ncols=len(t_visualize), figsize=(13, 7))
for i in range(len(t_visualize)):
mesh_tuple = (shape1.points(), np.asarray(shape1.faces()), signature[:, t_visualize[i]])
layer = viewer.add_surface(mesh_tuple, colormap='inferno', contrast_limits=[0.0, 0.03], name=f'Cessna HKS t={t_visualize[i]}')
viewer.camera.angles = (168, -54, 109)
viewer.camera.zoom = 250
viewer.camera.center = (-0.175, 0.621, -0.119)
screenshot = viewer.screenshot()
layer.visible = False
axes[i].imshow(screenshot)
axes[i].axis('off')
axes[i].set_title(f'Time {t_visualize[i]}')

signature = nso.signatures.heat_kernel_signature((shape2.points(), np.asarray(shape2.faces())), times=times)
fig, axes = plt.subplots(ncols=len(t_visualize), figsize=(13, 7))
for i in range(len(t_visualize)):
mesh_tuple = (shape2.points(), np.asarray(shape2.faces()), signature[:, t_visualize[i]])
layer = viewer.add_surface(mesh_tuple, colormap='inferno', contrast_limits=[0.0, 0.06], name=f'Cow HKS t={t_visualize[i]}')
viewer.camera.angles = (86, 0, -15)
viewer.camera.zoom = 250
viewer.camera.center = (-0.175, 0.621, -0.119)
screenshot = viewer.screenshot()
layer.visible = False
axes[i].imshow(screenshot)
axes[i].axis('off')
axes[i].set_title(f'Time {t_visualize[i]}')

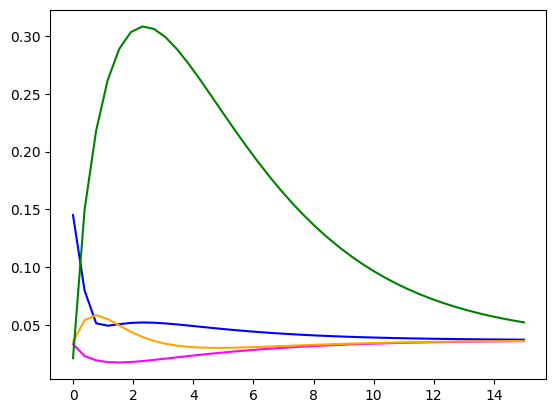
Plot some signatures#
point1 = shape2.faces()[5355][2]
point2 = shape2.faces()[3757][2]
point3 = shape2.faces()[3385][2]
point4 = shape2.faces()[4520][2]
pt_settings = {'size': 0.1, 'edge_color': 'black', 'blending': 'additive'}
viewer.add_points(shape2.points()[point1], **pt_settings, face_color='blue')
viewer.add_points(shape2.points()[point2], **pt_settings, face_color='magenta')
viewer.add_points(shape2.points()[point3], **pt_settings, face_color='orange')
viewer.add_points(shape2.points()[point4], **pt_settings, face_color='green')
layer.visible = True
napari.utils.nbscreenshot(viewer)

times = np.linspace(0, 15, 40)
signature = nso.signatures.heat_kernel_signature((shape2.points(), np.asarray(shape2.faces())),
times=times, scaled=True, robust=True)
fig, ax = plt.subplots()
ax.plot(times, signature[point1, :], label='Signature 1', color='blue')
ax.plot(times, signature[point2, :], label='Signature 2', color='magenta')
ax.plot(times, signature[point3, :], label='Signature 3', color='orange')
ax.plot(times, signature[point4, :], label='Signature 3', color='green')
[<matplotlib.lines.Line2D at 0x1fc044439a0>]
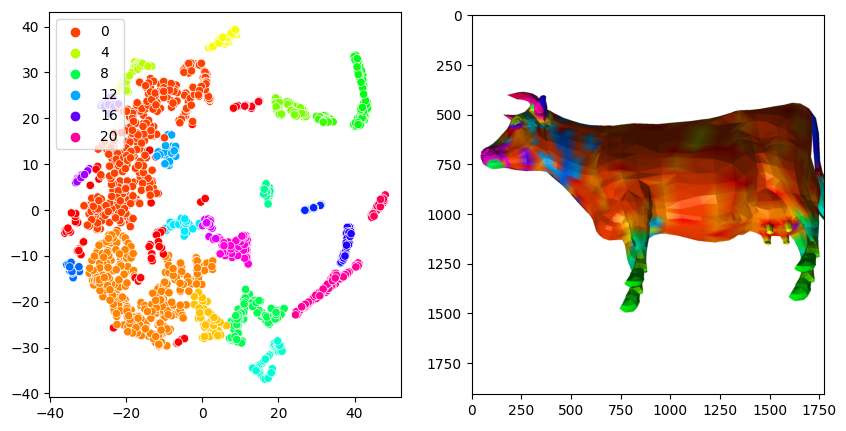
Clustering#
Lte’s try some unsupervised machine learning. The plot above shows us that the most interesting part of the story happens in the earlier timepoints, sho we’ll only look at these values.
df = pd.DataFrame(signature[:, :20], columns=times[:20])
reducer = manifold.TSNE(n_components=2, perplexity=50, random_state=0)
embedding = reducer.fit_transform(df)
clusterer = cluster.DBSCAN(eps=2.5, min_samples=20)
clusterer.fit(embedding)
fig, axes = plt.subplots(ncols=2, figsize=(10, 5))
sns.scatterplot(x=embedding[:,0], y=embedding[:,1], hue=clusterer.labels_, palette='hsv', ax=axes[0])
layer = viewer.add_surface((shape2.points(), np.asarray(shape2.faces()), clusterer.labels_), colormap='hsv')
screenshot = viewer.screenshot()
layer.visible = False
axes[1].imshow(screenshot)
<matplotlib.image.AxesImage at 0x1fbff707250>
Wave kernel#
Let’s do the same thing with the wave kernel.
energies = np.linspace(0, 10, 20)
e_visualize = np.arange(0, 20, 4)
energies
array([ 0. , 0.52631579, 1.05263158, 1.57894737, 2.10526316,
2.63157895, 3.15789474, 3.68421053, 4.21052632, 4.73684211,
5.26315789, 5.78947368, 6.31578947, 6.84210526, 7.36842105,
7.89473684, 8.42105263, 8.94736842, 9.47368421, 10. ])
signature = nso.signatures.wave_kernel_signature((shape2.points(), np.asarray(shape2.faces())), energies=energies)
fig, axes = plt.subplots(ncols=len(e_visualize), figsize=(13, 7))
for i in range(len(e_visualize)):
mesh_tuple = (shape2.points(), np.asarray(shape2.faces()), signature[:, e_visualize[i]])
layer = viewer.add_surface(mesh_tuple, colormap='inferno', name=f'Cow WKS e={e_visualize[i]}')
viewer.camera.angles = (86, 0, -15)
viewer.camera.zoom = 250
viewer.camera.center = (-0.175, 0.621, -0.119)
screenshot = viewer.screenshot()
layer.visible = False
axes[i].imshow(screenshot)
axes[i].axis('off')
axes[i].set_title(f'Time {e_visualize[i]}')

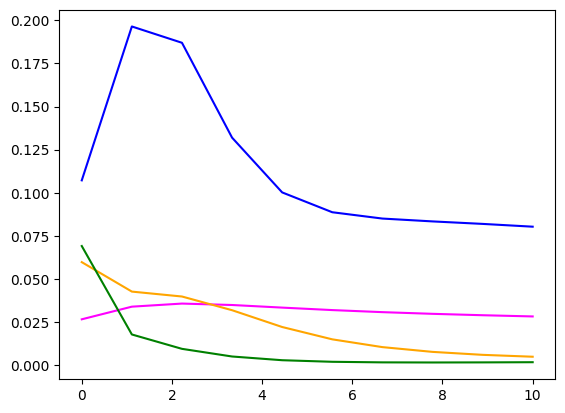
energies = np.linspace(0, 10, 10)
signature = nso.signatures.wave_kernel_signature((shape2.points(), np.asarray(shape2.faces())),
energies=energies, scaled=True, robust=True)
fig, ax = plt.subplots()
ax.plot(energies, signature[point1, :], label='Signature 1', color='blue')
ax.plot(energies, signature[point2, :], label='Signature 2', color='magenta')
ax.plot(energies, signature[point3, :], label='Signature 3', color='orange')
ax.plot(energies, signature[point4, :], label='Signature 3', color='green')
[<matplotlib.lines.Line2D at 0x1fc05f059a0>]
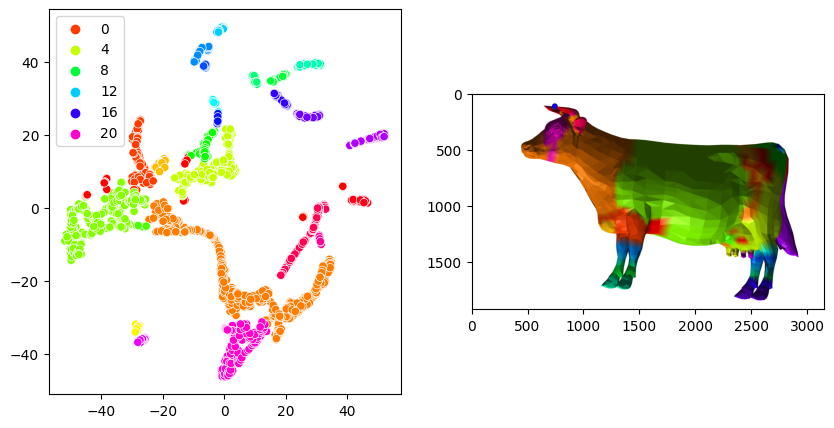
Clustering#
Lte’s try some unsupervised machine learning. Rhe plot above shows that the quantum-mechanical energy levels are a bit more informative also for higher energies, so we can use them as well.
df = pd.DataFrame(signature, columns=[f'{i}' for i in range(signature.shape[1])])
reducer = manifold.TSNE(n_components=2, perplexity=60, random_state=0)
embedding = reducer.fit_transform(df)
clusterer = cluster.DBSCAN(eps=2.5, min_samples=20)
clusterer.fit(embedding)
fig, axes = plt.subplots(ncols=2, figsize=(10, 5))
sns.scatterplot(x=embedding[:,0], y=embedding[:,1], hue=clusterer.labels_, palette='hsv', ax=axes[0])
layer = viewer.add_surface((shape2.points(), np.asarray(shape2.faces()), clusterer.labels_), colormap='hsv')
screenshot = viewer.screenshot()
layer.visible = False
axes[1].imshow(screenshot)
<matplotlib.image.AxesImage at 0x1fc2b4a6040>